控制五金电器气压致
控制阀执行器和定位器
控制阀执行机构需要进行操作。本教程简要讨论了电动和气动执行机构之间的差异,直接作用之间的关系和反作用的术语,以及如何影响阀门的控制作用。定位的重要性,对于他们做什么,他们为什么需要对许多应用进行讨论。
执行器
在方框5中,“控制理论”,一个类似于用于描述简单的过程控制:
•手臂肌肉和手(致动器)转动阀门 - (受控装置)。
一种形式的控制装置,控制阀,现在已经被覆盖。执行器是下一个感兴趣的逻辑领域。
控制阀的操作包括将其活动部件(塞、球或叶片)相对于阀门的固定座进行定位。阀门执行机构的目的是精确定位阀塞在控制信号指示的位置。
The actuator accepts a signal from the control system and, in response, moves the valve to a fully-open or fully-closed position, or a more open or a more closed position (depending on whether ‘on/off’ or ‘continuous’ control action is used).
有几种方法可以提供这种致动。该模块将集中在两个主要的模块:
- 气动。
- 电动。
其他重要的执行机构包括液压和直接作用类型。这些将在第7章“控制设备:自动控制”中讨论。
气动执行器 - 操作和选择
气动执行器通常用于执行控制阀,有两种主要形式;活塞执行器(图6.6.1)和膜片执行器(图6.6.2)

活塞式执行机构
通常使用活塞致动器,其中隔膜致动器的行程太短或推力太小。压缩空气施加到固体圆筒内的固体活塞。活塞致动器可以单一作用或双作用,可以承受更高的输入压力,可以提供较小的圆柱体积,可以高速采用。
隔膜执行器
膜片驱动器将压缩空气应用于一种叫做膜片的柔性薄膜上。图6.6.2显示了一个滚动的膜片,其中有效膜片面积在整个致动器行程中几乎是恒定的。这些类型的执行机构是单作用的,空气只供应到隔膜的一侧,它们可以是直接作用(弹簧收缩)或反向作用(弹簧伸展)。

反向代理(spring-to-extend)
操作力衍生自压缩空气压,其施加到柔性隔膜。致动器设计成使得由气压乘以隔膜面积的力克服了弹簧施加(沿相反方向)的力。
隔膜(图6.6.2)被向上推,拉主轴起来,如果主轴被连接到一个直接作用的阀,该插件被打开。该致动器被设计成使得与空气压力的变化的具体,主轴将充分移动通过其完整行程移动的阀从全闭到全开。
随着空气压力降低,弹簧(S)在相反方向上移动主轴。空气压力范围等于所述致动器弹簧额定值,例如0.2-1巴。
具有较大的阀和/或更高的压差抵抗工作时,需要更大的力来获得完全的阀运动。
为了创建更大的力,需要较大的光圈区或更高的弹簧范围。这就是为什么控制制造商提供一系列气动致动器的相匹配的范围内的阀门 - 包括增加膜片面积,并且弹簧的选择范围,以创建不同的力。
图6.6.3的图表显示了基本气动致动器的组件和主轴运动方向,随着空气压力的增加。

直接作用致动器(弹簧回缩)
直接作用致动器设计成与光圈下方的弹簧设计,其中空气向隔膜上方的空间供应。随着空气压力的增加是沿相反的方向的主轴移动到反向作用致动器。
这种运动对阀门开口的影响取决于所用的阀门的设计和类型,如图6.6.3所示。
但是,还有一种替代方法,如图6.6.4所示。一个直接作用的气动执行机构与一个反向作用的阀塞(有时称为“悬挂阀”)连接在一起。

直接作用和反向作用气动控制的选择取决于当压缩空气供应出现故障时阀门应该恢复到什么位置。阀门应该关闭还是完全打开?这种选择取决于应用程序的性质和安全要求。当空气出现故障时,蒸汽阀关闭,冷却阀打开是有意义的。必须考虑执行机构和阀门类型的组合。
图6.6.5和6.6.6图显示了各种组合的净效应。

压差对阀升力的影响
送入隔膜室中的空气是从气动控制器的控制信号。最广泛使用的信号的空气压力为0.2巴至1巴。考虑一个反向作用的致动器(弹簧到延伸)与标准的0.2至1.0巴的弹簧(一个或多个),装配到一个直接作用的阀(图6.6.7)。

当阀门和执行器组件被校准(或“工作台”)时,它被调整到0.2 bar的空气压力将刚刚开始克服弹簧的阻力,并将阀门插头从阀座上移动。
随着空气压力的增加,阀塞逐渐远离座椅移动,直到最后在1巴的空气压力下,阀门是100%打开的。这在图6.6.7中以图形方式显示。
现在将这个组件安装在压力减小应用中的管道中,上游侧的10巴g并控制下游压力至4 bar g。
横跨阀的压力差为10 - 4 = 6巴。这个压力作用在阀塞的下侧,提供力趋于打开阀门。这个力是在除了通过在致动器的空气压力提供的力。
因此,如果致动器在0.6巴(0.2和1巴之间的中途)的空气中供应,则例如占据预期的50%打开位置的阀门,如果提供的额外的力,则实际开口将更大。通过差压。
另外,该附加的力装置,其阀未在0.2巴关闭。为了关闭阀在该实例中,控制信号必须被减小到大约0.1巴。
与热交换器中的蒸汽阀控制温度略有不同,随着阀的差压在:
- 最小,当处理呼唤最大热量,并且控制阀是100%打开。
- 当过程高达温度并且控制阀关闭时,最大值。
随着热负荷的增加,热交换器中的蒸汽压力增加。这可以在模块6.5,实施例6.5.3和表6.5.7中看到。
如果控制阀上游的压力保持恒定,那么,随着蒸汽压力在热交换器中上升,阀门穿过阀门的差压必须减小。
图6.6.8显示了空气作用于直接作用执行器的情况。在这种情况下,压差在阀塞上产生的力与空气压力相反。其影响是,如果执行机构提供0.6 bar的空气,例如,不是阀门占用预期的50%开度位置,由于压差提供的额外力,开度百分比将更大。在这种情况下,控制信号必须增加到大约1.1。阻止阀门完全关闭。

可以重新校准阀和致动器以将通过差压产生的力考虑,或者可能使用不同的弹簧,空气压力和致动器组合。这种方法可以在小阀门上提供经济解决方案,具有低差分压力,并且不需要精确控制。但是,实用性是:
- 较大的阀门具有更大的差压面积,从而增加产生的力,并对阀门位置产生增加的效果。
- 更高的压差意味着更高的力产生。
- 阀门和执行器产生摩擦力,引起滞后。规模较小的阀门可能有相对于所涉及的总力更大的摩擦力。
该解决方案是安装一个定位器的阀/致动器组件。(更多信息被定位在该模块后面给出)。
注意:为简单起见,上述示例假设未使用定位器,并且滞后为零。
用于确定用于各种阀门和致动器组合座椅上的可用于阀门的推力的公式如图6.6.9所示。
在哪里:
中A =膜片的有效面积
PMAX =最大压力致动器(通常1.2巴)
Smax =弹簧的最大台阶设置
PMIN =最小压力到致动器(通常为0巴)
弹簧的SMIN =最小工作台设置
可关闭阀门的推力必须提供三个功能:
- 克服关闭位置的流体压差。
- 为了克服摩擦的阀门和执行器,主要是在阀和致动器杆密封件。
- 提供阀塞和阀座之间的密封载荷,以确保所需的密封程度。
控制阀制造商通常会提供其各种阀门和执行机构/弹簧组合操作时的最大压差的详细信息;图6.6.10中的表格就是这个数据的一个例子。
注意:当使用定位器时,有必要将制造商的文献指代最小和最大的空气压力。


定位器
对于许多应用,在隔膜室中的0.2至1巴的压力下可能不足以应付摩擦和高压差。较高的控制压力和更强的弹簧也可以使用,但实际的解决方案是使用一个定位器。
这是一个额外的项目(参见图6.6.11),其通常适配在致动器的轭或柱上,并且通过反馈臂与致动器的主轴连接以监测阀位置。它需要自己的更高压力空气供应,它用于定位阀门。

阀定位器涉及输入信号和阀门位置,并且将根据阀的要求和在最大供应压力的限制内为致动器提供任何输出压力以满足这种关系。
当定位器装配到“空对开”阀和致动器布置时,可以增加弹簧范围以增加闭合力,因此增加特定阀可以容忍的最大差压。也将根据需要调整空气压力以克服摩擦,从而减少滞后效应。
实施例:以装配到DN50阀PN5400系列的致动器(见表图6.6.10)
- 使用标准0.2至1.0杆弹簧范围(PN5420),最大允许压差为3.0巴。
- 具有1.0至2.0巴的弹簧组(PN5426),最大允许压力差增大到13.3巴。
与所述第二选项中,0.2至1.0巴信号的空气压力施加到所述致动器隔膜不能提供足够的力来克服由1.0至2.0巴的弹簧提供的力而移动的致动器,甚至不太能够在其整个工作范围内控制它。在这种情况下,定位充当放大器的控制信号,并且调制该供给空气压力,向致动器移动到一个位置适合于控制信号压力。
例如,如果控制信号为0.6巴(50%气门升程),定位器将需要大约允许1.5巴到致动器隔膜室。图6.6.12示出了这种关系。

应当注意的是,定位是一个比例装置,并在相同的方式,比例控制器将永远给偏移,所以做了定位。
在典型定位器上,比例带可以在3到6%之间。通常可以调整定位器灵敏度。必须在调试阶段之前读取安装和维护说明。
总结 - 定位器
- 定位器确保来自控制系统的信号输入压力与控制阀的位置之间存在线性关系。这意味着对于给定输入信号,阀门将始终试图保持相同的位置,而不管阀差压,阀杆摩擦,隔膜滞后等变化。
- 的定位器可以被用作一个信号放大器或助推器。它接受一个低压空气控制信号,并且通过使用其自己的较高的压力输入,乘这提供了更高的压力输出空气信号到致动器隔膜,如果需要,以确保该阀到达期望的位置。
- 一些定位器并入的电动气动转换器,使得电输入(通常为4 - 20 mA)的可用于控制一个气动阀。
- 一些定位器还可以充当基本控制器,接受来自传感器的输入。
一个常见的问题是,'什么时候应该安装定位器?'
应在以下情况下考虑定位器:
- 当需要准确的阀门定位时。
- 加快阀门响应。定位器使用更高的压力和更大的气流来调节阀门位置。
- 增加特定致动器和阀门可以靠近的压力。(充当放大器)。
- 在阀门(特别是包装)中的摩擦会导致不可接受的滞后。
- 线性化非线性执行器。
- 在流体内的不同差分压力会使插头位置变化
为了确保能够接受阀门的全压差,重要的是要调整定位器的零位设置,使阀门在密封时没有空气压力对抗弹簧力。
图6.6.13显示了一个典型定位器。常见的是,因为它需要从控制系统气动信号(P),并提供所得到的气动输出信号(P),以移动致动器,这将被称为为P至P定位器。

气动控制的优点之一是,它在本质上是安全的,即没有在一个危险的气息爆炸的危险,它可以提供大量的力来关闭对高压差的阀门。然而,气动控制系统本身具有许多局限性与他们的电子同行相比。

为了缓解这一点,可以使用额外的部件来实现气动阀和致动器的优点,以便与电子控制系统一起使用。
基本单元是P转换器。该单元采用电气控制信号,通常为4-20mA,并将其转换为气动控制信号,通常为0.2-1巴,然后将其送入致动器,或P到P定位器,如图所示6.6.15。

利用这种布置,可以在任何危险区域外部或远离任何过多的环境温度外部进行I到P(电到气动)转换,这可能在阀门和管道附近发生。
然而,在条件不存在这样的问题,更整洁解决方案是使用一种单组分电动气动转换器/定位器,它结合了一个I至P转换器和P为P定位器的功能,即是组合阀门定位器和电空转换器。图6.6.16示出了典型的I至P转换器/定位器。

大多数传感器仍然具有模拟输出(例如4-20 mA或0 - 10 V),可以转换为数字形式。通常,控制器将执行此模拟 - 数字(A / D)转换,尽管技术现在使传感器能够自己执行此A / D功能。数字传感器可以直接连接到诸如现场总线的通信系统中,并且在长距离中发送到控制器的数字化数据。与模拟信号相比,数字系统不易受电干扰的影响。
模拟控制系统限于在相对短的距离本地传输由于布线的电阻特性。
大多数电动执行器仍然需要模拟控制信号输入(例如4 - 20ma或0 - 10v),这进一步抑制了传感器、执行器和控制器之间的数字通信网络的完成。
数字定位
有时被称为智能定位时,数字定位器监测阀位置,并且将此信息转换成数字形式。有了这些信息,综合微处理器提供先进的用户功能,例如:

选择气动阀和执行器
总之,以下是选择气动阀和执行器时必须考虑的主要因素列表:
- 使用应用程序数据选择阀门。
- 确定电源故障,故障打开或故障关闭时所需的阀门动作。
- 选择阀门执行器和弹簧组合,以确保阀门将打开或靠近差压。
- 确定是否需要定位器。
- 确定是否气动或电动控制信号将被提供。这将确定的I至P转换器,或者可选地组合的I至P转换器/定位器是否是必需的。
旋转式执行器和定位器
可用于驱动旋转动作阀门,例如球和蝶阀。最常见的是活塞式,其包括中心轴,两个活塞和壳体内的中心室。活塞和轴具有机架和小齿轮驱动系统。
在最简单的类型中,空气被送入中心室(图6.6.18a),这迫使活塞向外。
齿条和小齿轮装置转动轴,因为后者与阀杆连接,阀门打开或关闭。
当缓释空气压力时,由于返回弹簧的力发生(图6.6.18b),轴在相反方向上移动(图6.6.18b)。
它也可以得到双重作用版本,它们没有回位弹簧。空气可以被送入活塞的任一方向的两侧,以引起运动。与膜片型激励器,它们也可以安装有定位器。
空气供给
一个足够的压缩空气供应系统是必要的,以提供清洁和干燥的空气,在适当的数量和压力。在每台设备的最终供应连接之前安装一个单独的聚合过滤器/稳压器是很有利的。空气质量对于气动仪表(如控制器、I到P转换器和定位器)尤为重要。
用于气动操作的系统来选择的决定可以由可用性和/或安装这种系统的成本的影响。现有的空气供应将明显鼓励使用气动控制。
电动执行器
在不可用或期望气动供应的情况下,可以使用电动致动器来控制阀门。电动执行器在下列范围内使用电动机电压要求:230 Vac,110 Vac,24 Vac和24 VDC。
有两种类型的电致动器的;VMD(阀电机驱动)和调制。
VMD(阀电机驱动)
电动执行器的这一基本版本有三种状态:

图6.6.20显示了VMD系统,其中执行器的正向和反向行程直接从任何外部3位置或两个2位置开关单元控制。开关额定在致动器电压下,并且可以由合适的继电器代替。
在VMD执行器中安装了限制装置,以保护电机不受过行程损坏。这些设备是基于最大电机扭矩或物理位置限制开关。这两个装置通过中断电机电源来停止电机驱动。
- 位置限位开关的优点在于它们可以调整,以限制过大的阀门阀行程。
- 扭矩开关具有赋予在阀座限定的闭合力,保护致动器在阀杆发作的情况下的优点。
- 如果仅使用位置限位开关,它们可以与一个弹簧加载的耦合被组合以确保阀门严密关闭。
甲VMD致动器可用于开/关的致动或用于调节控制。控制器通过驱动阀打开或在一定时间内关闭,以确保它到达期望的位置定位所述阀。阀位置的反馈可以与一些控制器一起使用
调制
为了响应于该系统要求的致动器调节可用于定位所述控制阀。这些单元可以具有更高的额定马达(通常为1点200开始/小时)和可具有内置的电子装置。
定位电路可被包括在所述调制器,它接受一个模拟控制信号(典型地为0-10 V或4-20毫安)。致动器然后解释该控制信号,作为限位开关之间的阀位置。
为了实现这一目标,该致动器具有一位置传感器(通常是一个电位器),该馈送实际阀位回到定位电路。以这种方式,致动器可以沿其行程正比于控制信号进行定位。调制致动器的示意图示于图6.6.21 ..

气动执行器具有固有的故障安全功能;如果空气供应或控制信号故障,阀门将关闭。为了在电动执行器中提供此功能,可提供“Spring Reserve”版本,其将打开或关闭电源或控制信号故障的阀门。或者,可以提供电池电量的故障安全性。
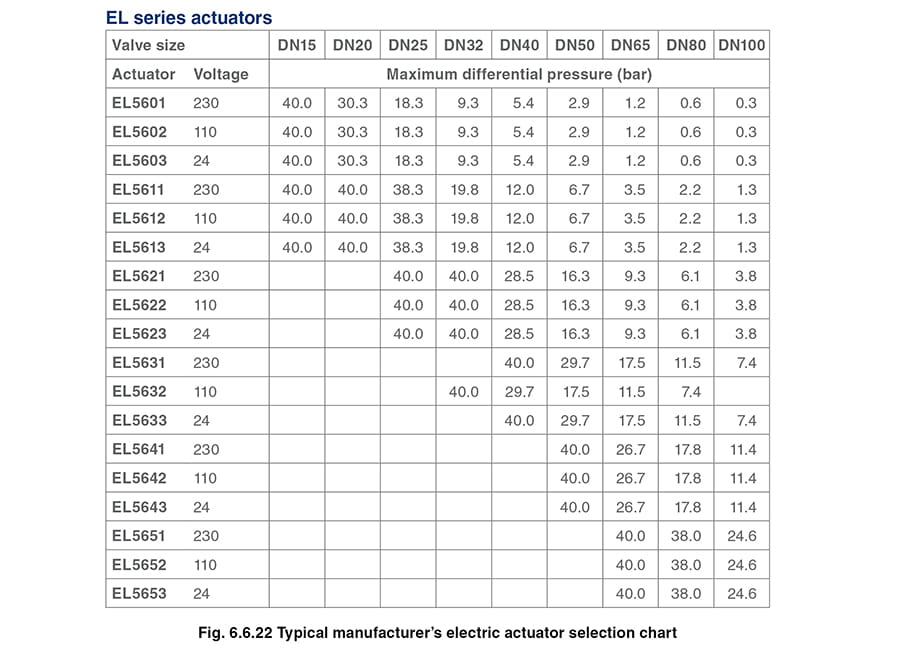
电动执行器提供的特定部队,这可能在春季储备版本的限制。制造商的图表应该总是选择过程中进行协商。
在大小调整执行器时,可以指代制造商的技术数据表,以实现阀门的最大差压(参见图6.6.22)。
电致动器的另一个限制是阀移动的速度,其可以是低至4秒/毫米,这在快速变化的系统可能太慢。